スマート農業実現に資する最先端技術として農機の自動運転などが挙げられます。現在、日本各地で実証実験が行われ、今後新しい農業が普及することが期待されます。
それにともなって、農業分野におけるナビゲーションも登場しています。目印がない圃場などでも利用するためには、私たちが日頃使っているカーナビ(カーナビゲーション)やスマフォのナビゲーションより、さらに高精度の位置計測が必要になります。位置精度が悪いと隣の圃場に位置することになってしまいます。
近年、GNSS受信機の低価格化によって、個人でも数cmの誤差で位置を計測することが可能となってきました。そこで、本作品はRTK-GNSSをトラクターに搭載し、高精度かつ効率的に耕すことができる自作トラクターナビゲーションを構築しました。
コンセプト
- 高精度な位置計測
低コスト化したGNSS受信機を導入
- 背景地図の自由度(農作業によって欲しい地図が変化)
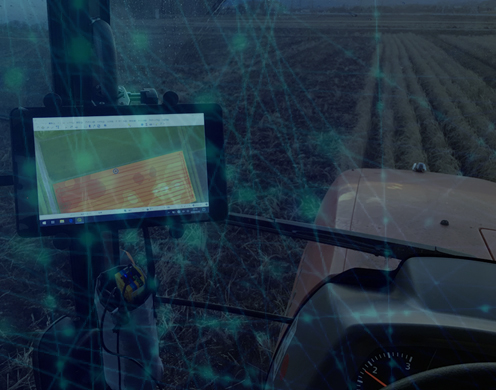
ドローンで計測した凹凸マップやNDVIマップ など
→ 既存デバイスの組合わせでシステムを構築
従来のカーナビ(カーナビゲーション)は目的地に到着することが主な目的ですが、農業版ナビは農作業の内容によって目的が変化します。しかし、ほとんどの機種は背景地図まで注目されず、図形を塗り潰したものや背景そのものが変更できないものもあります。本作品のトラクターナビゲーションは背景地図に注力しています。ドローンで計測した凹凸マップや作土層の深さを示すマップなどユーザ側で任意に選択できます。実際に、水稲農家が本ナビゲーションを使用して栽培した結果、収量(導入前と比べて3割増収)および味に関して大幅に向上しています。